Interactive Decoration/Animatronics with Embedded System Control
Aug 2021 – Dec 2021
Developed a Halloween decoration using embedded systems. In-depth research was done to design a functioning Printed Circuit Board.

Aug 2021 – Dec 2021
Developed a Halloween decoration using embedded systems. In-depth research was done to design a functioning Printed Circuit Board.
Aug 2021 – Dec 2021
Designed Bluetooth Robot Arm with inbuilt Forward/Inverse Kinematics calculator to reach target location.
Jan 2022 – Apr 2022
Worked on a Rockwell PLC with industrial sensing technology, and industrial actuator and developed Supervisory control and data acquisition (SCADA) for the Human-machine interface (Machine: SMC HAS 200).
Jan 2022 – Apr 2022
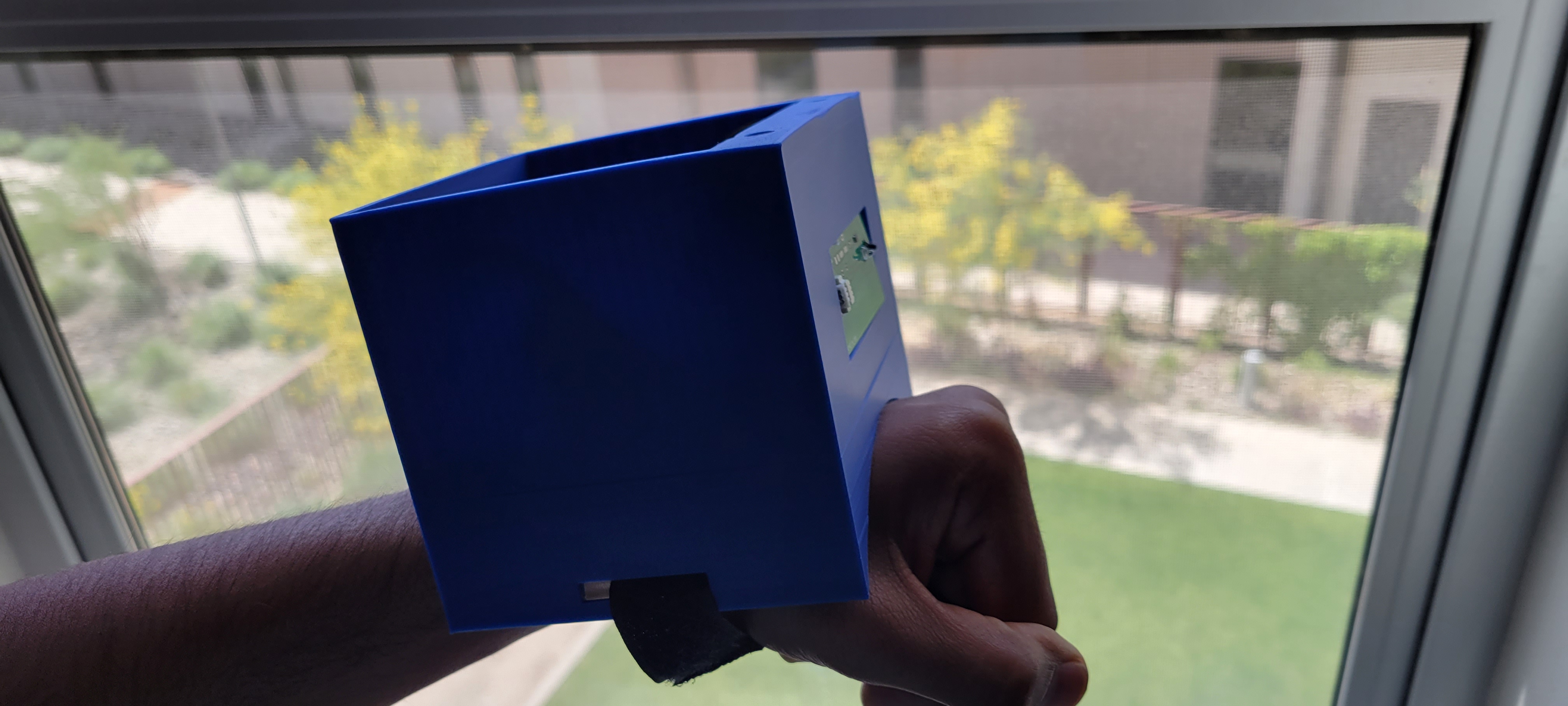
Developed an Embedded System that uses data collected from sensors to control the actuators with wireless WiFi control to help stoke patients.
Aug 2023 – May 2023
Designed two independent hoists to pick up and change copper rolls (700 lbs) used for PCB manufacturing.
Jan 2023 – May 2023
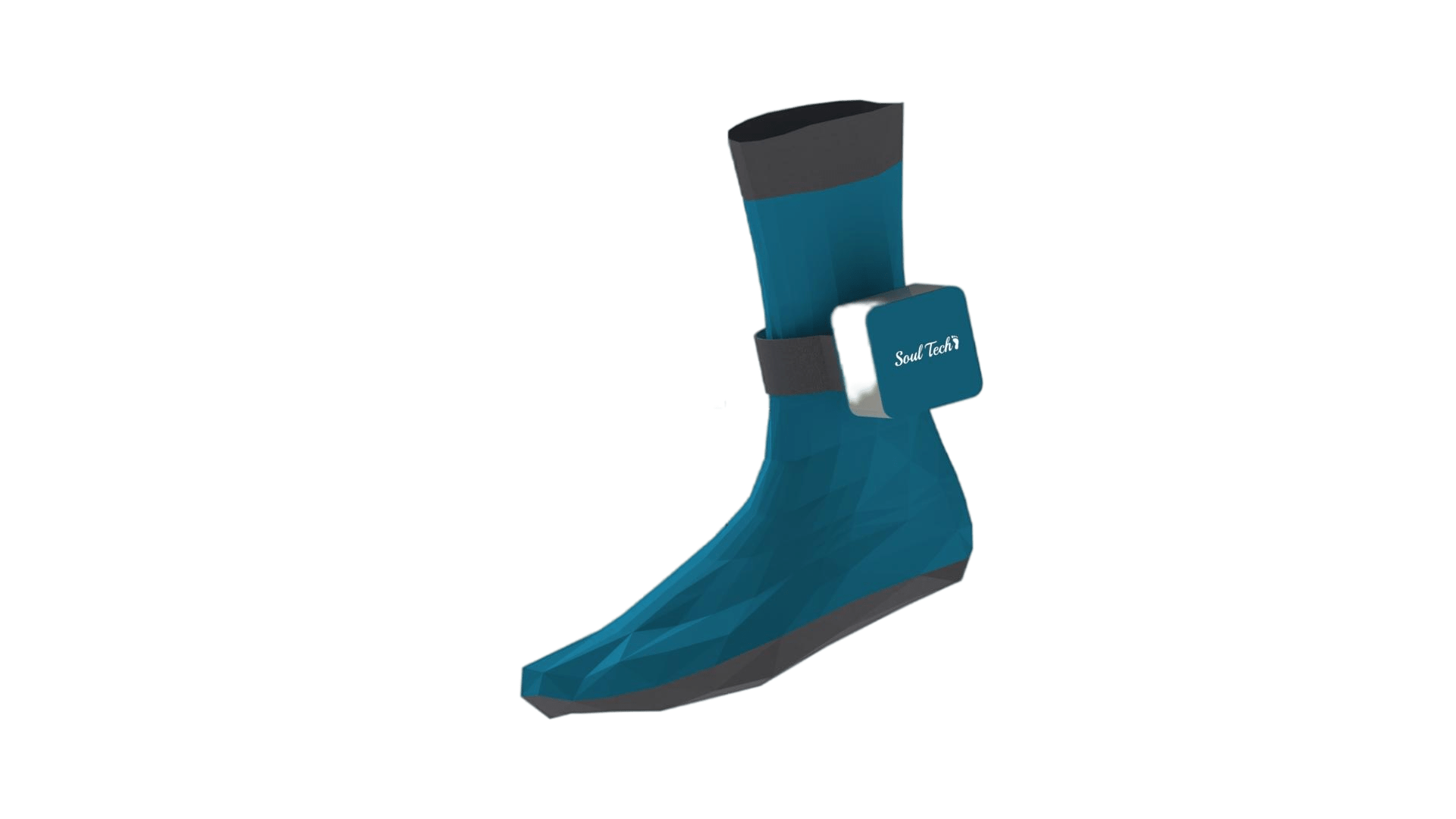
Developed compact and portable footwear for gait analysis to improve gait balance for patients at the Barrow Institute.
Jan 2024 – April 2024
Designed and implemented a VCO2 and VO2 metabolic monitor, integrating CAD design, coding, and MATLAB interface with Bluetooth (BLE) connectivity for real-time data collection.
April 2024
Developed Robotics Package, integrating manipulator dynamics, force control, and Interactive GUI.
Jan 2025 – Apr 2025
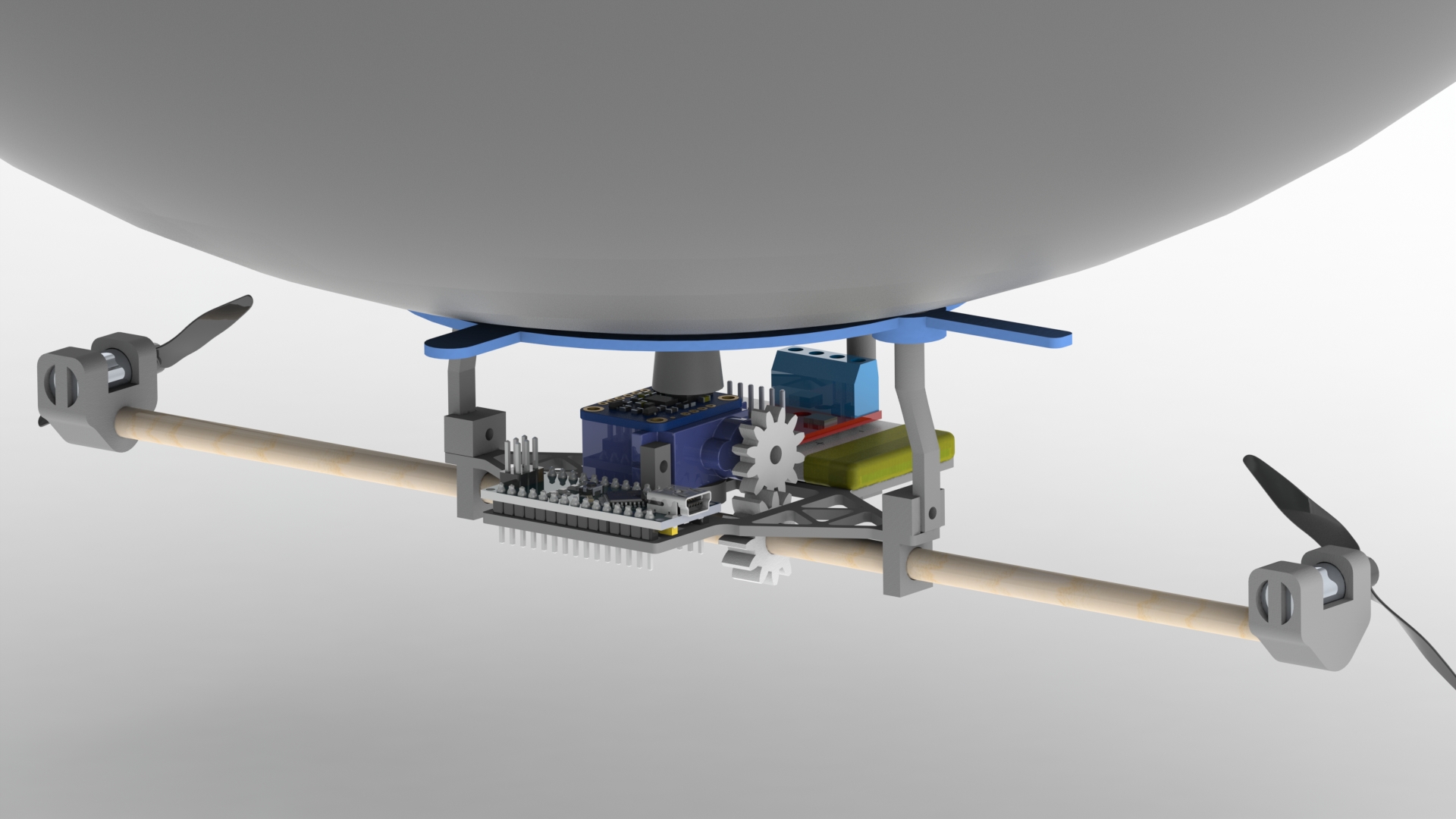
The project aims to develop an integrated, sensor-driven framework that enables a Biologically-inspired, Lighter-than-air, Instructional, Mechatronics Program (BLIMP) UAV to operate autonomously in dynamic and uncertain environments.
Sensor-fusion, ROS 2, and vision for an autonomous lighter-than-air vehicle.
Oct 2025 – Dec 2025
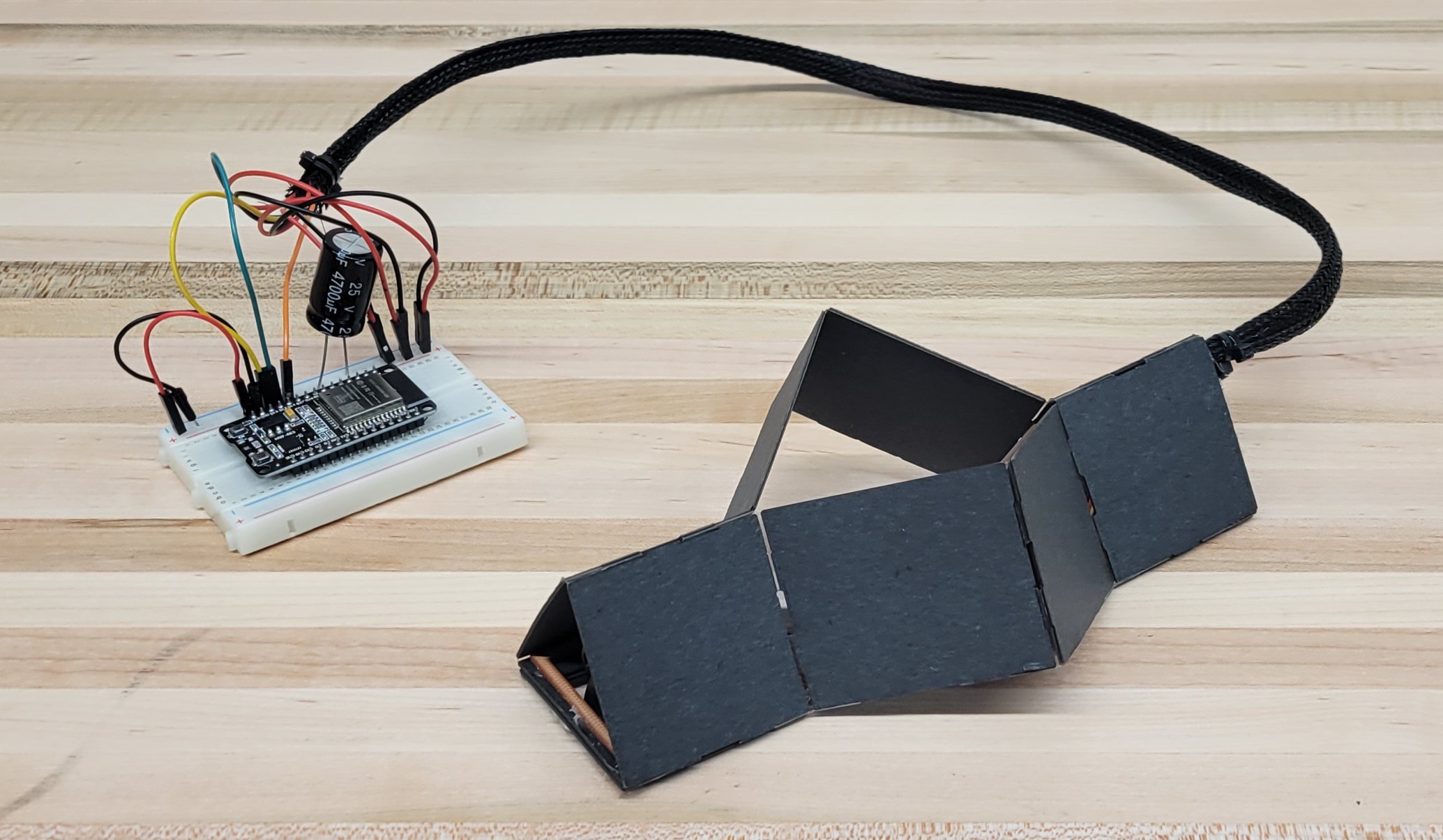
Driven by the principles of foldable robotics, this compact inchworm robot demonstrates how far creativity, clever mechanisms, and a single sheet of material can go.
Published in Journal 1, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1).
Download Paper | Download Slides | Download Bibtex
Published in Journal 1, 2010
This paper is about the number 2. The number 3 is left for future work.
Recommended citation: Your Name, You. (2010). "Paper Title Number 2." Journal 1. 1(2).
Download Paper | Download Slides
Published in Journal 1, 2015
This paper is about the number 3. The number 4 is left for future work.
Recommended citation: Your Name, You. (2015). "Paper Title Number 3." Journal 1. 1(3).
Download Paper | Download Slides
Published in GitHub Journal of Bugs, 2024
This paper is about fixing template issue #693.
Recommended citation: Your Name, You. (2024). "Paper Title Number 3." GitHub Journal of Bugs. 1(3).
Download Paper
Published:
This is a description of your talk, which is a markdown file that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Teaching Assistant Graduate/Undergraduate course, Arizona State University, 2023
Served as a Teaching Assistant for Robotic Systems II during the Spring 2023 and Spring 2024 semesters.
Prepared lab and assisted students in understanding key concepts and applications in robotics.
Grader Undergraduate course, Arizona State University, 2023
Served as a Grader for Thermo-Fluids I during the Summer 2023 semester.
Teaching Assistant Graduate/Undergraduate course, Arizona State University, 2023
Served as a Teaching Assistant for Robotic Systems I during the Fall 2023 semester.
Prepared lab and assisted students in understanding key concepts and applications in robotics.
Teaching Assistant Graduate course, Arizona State University, 2024
Served as a Teaching Assistant for Applied Linear Algebra during the Spring 2024 semester.
Teaching Assistant Graduate course, Arizona State University, 2024
Served as a Teaching Assistant for Python during the Spring 2024 semester.