Inchworm Foldable Robotics
Oct 2025 – Dec 2025
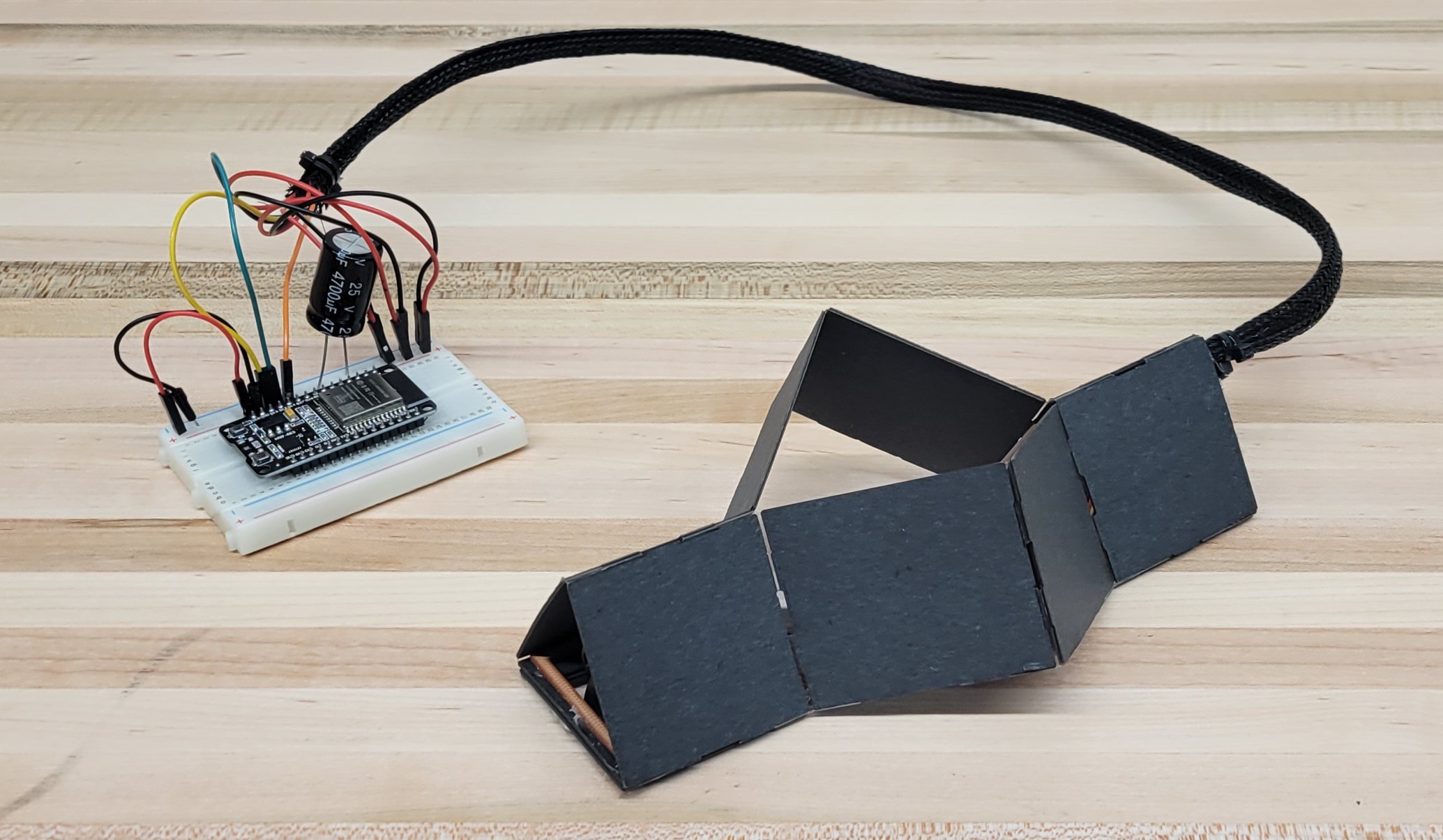
Driven by the principles of foldable robotics, this compact inchworm robot demonstrates how far creativity, clever mechanisms, and a single sheet of material can go.

Oct 2025 – Dec 2025
Driven by the principles of foldable robotics, this compact inchworm robot demonstrates how far creativity, clever mechanisms, and a single sheet of material can go.
Jan 2025 – Apr 2025
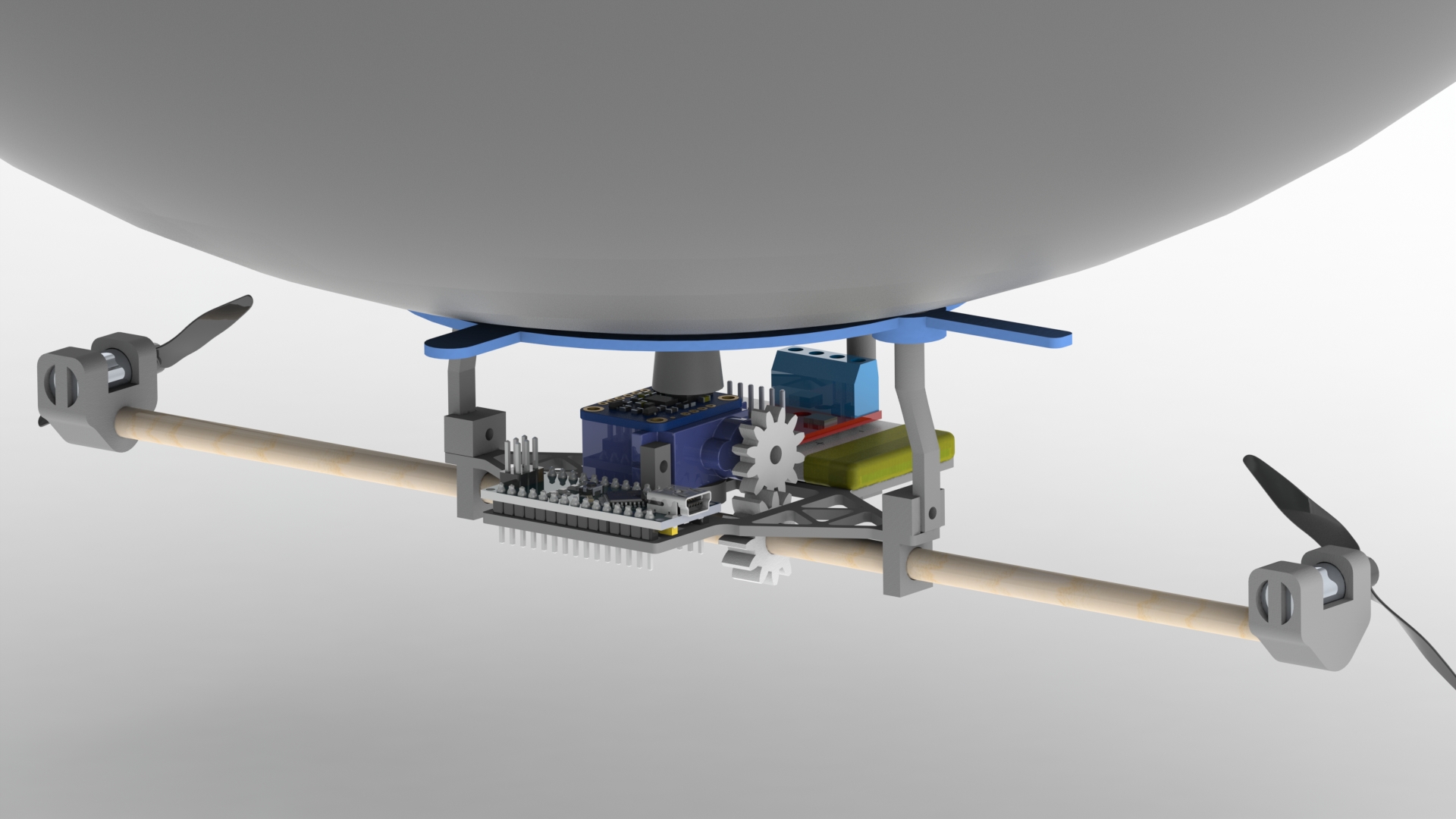
The project aims to develop an integrated, sensor-driven framework that enables a Biologically-inspired, Lighter-than-air, Instructional, Mechatronics Program (BLIMP) UAV to operate autonomously in dynamic and uncertain environments.
Sensor-fusion, ROS 2, and vision for an autonomous lighter-than-air vehicle.
April 2024
Developed Robotics Package, integrating manipulator dynamics, force control, and Interactive GUI.
Jan 2024 – April 2024
Designed and implemented a VCO2 and VO2 metabolic monitor, integrating CAD design, coding, and MATLAB interface with Bluetooth (BLE) connectivity for real-time data collection.
Jan 2023 – May 2023
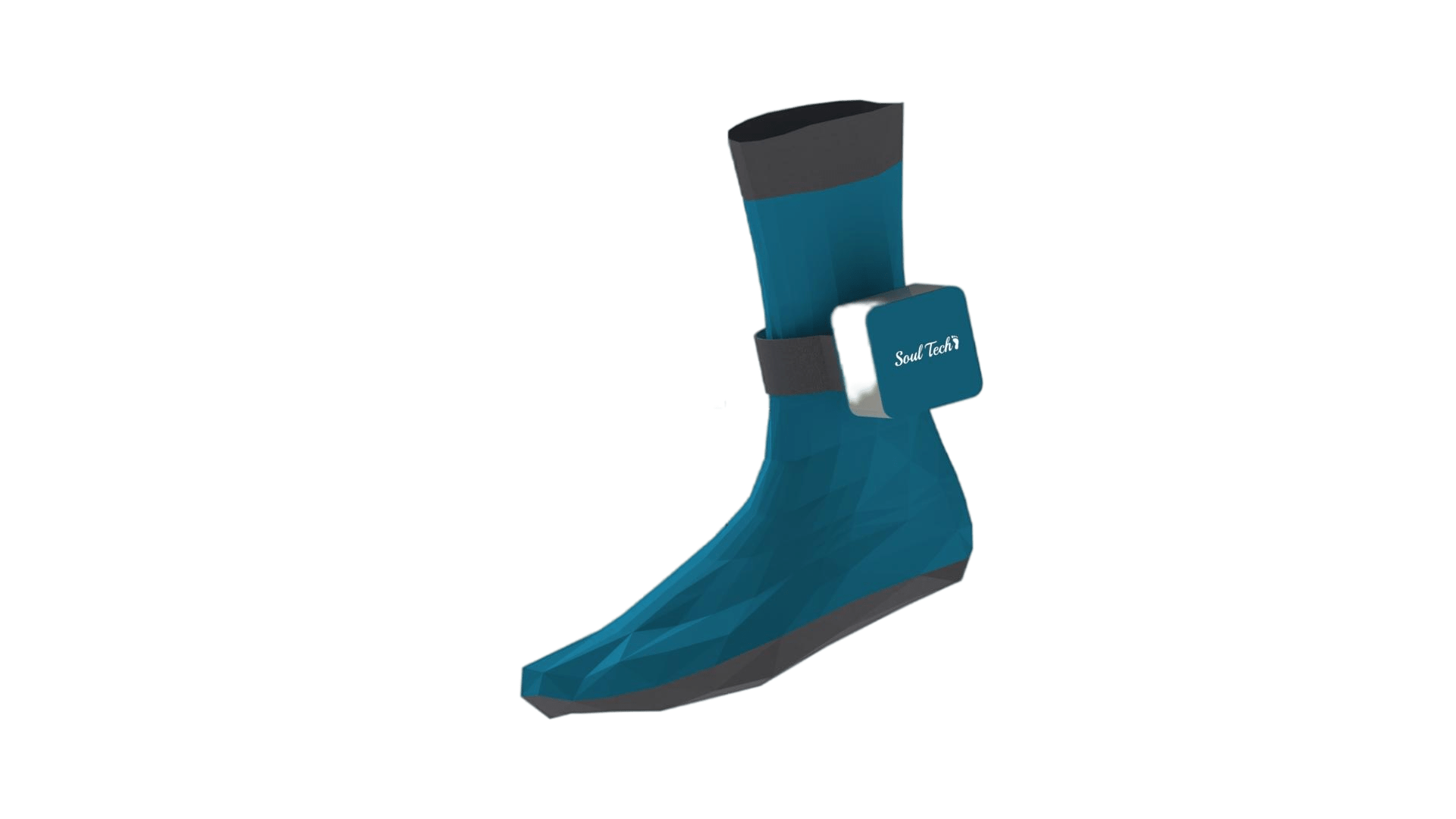
Developed compact and portable footwear for gait analysis to improve gait balance for patients at the Barrow Institute.
Aug 2023 – May 2023
Designed two independent hoists to pick up and change copper rolls (700 lbs) used for PCB manufacturing.
Jan 2022 – Apr 2022
Developed an Embedded System that uses data collected from sensors to control the actuators with wireless WiFi control to help stoke patients.
Jan 2022 – Apr 2022
Worked on a Rockwell PLC with industrial sensing technology, and industrial actuator and developed Supervisory control and data acquisition (SCADA) for the Human-machine interface (Machine: SMC HAS 200).
Aug 2021 – Dec 2021
Designed Bluetooth Robot Arm with inbuilt Forward/Inverse Kinematics calculator to reach target location.
Aug 2021 – Dec 2021
Developed a Halloween decoration using embedded systems. In-depth research was done to design a functioning Printed Circuit Board.