
AeroFusion: Autonomous BLIMP Navigation and Sensor Integration Platform
Check the website here
AeroFusion
Summary
AeroFusion develops a sensor-driven framework that enables a biologically inspired BLIMP UAV to detect, track, and approach targets autonomously in dynamic indoor environments. The system fuses IMU, barometer, and camera data within a modular ROS 2 stack and provides real-time telemetry through a browser-based GUI.
Highlights
- Perception: Custom YOLOv5 model with quadrant logic for target tracking.
- Control: PI and differential drive controls; force allocation via pseudo-inverse.
- Sensor Fusion: IMU + barometer filtering for stabilized altitude and attitude.
- ROS 2 Stack: C++ and Python nodes with explicit topic interfaces and launch files.
- GUI: WebSocket (rosbridge + roslibjs) interface with live video and telemetry.
- Validation: Thrust-stand characterization and Vicon-based motion tracking.
Media
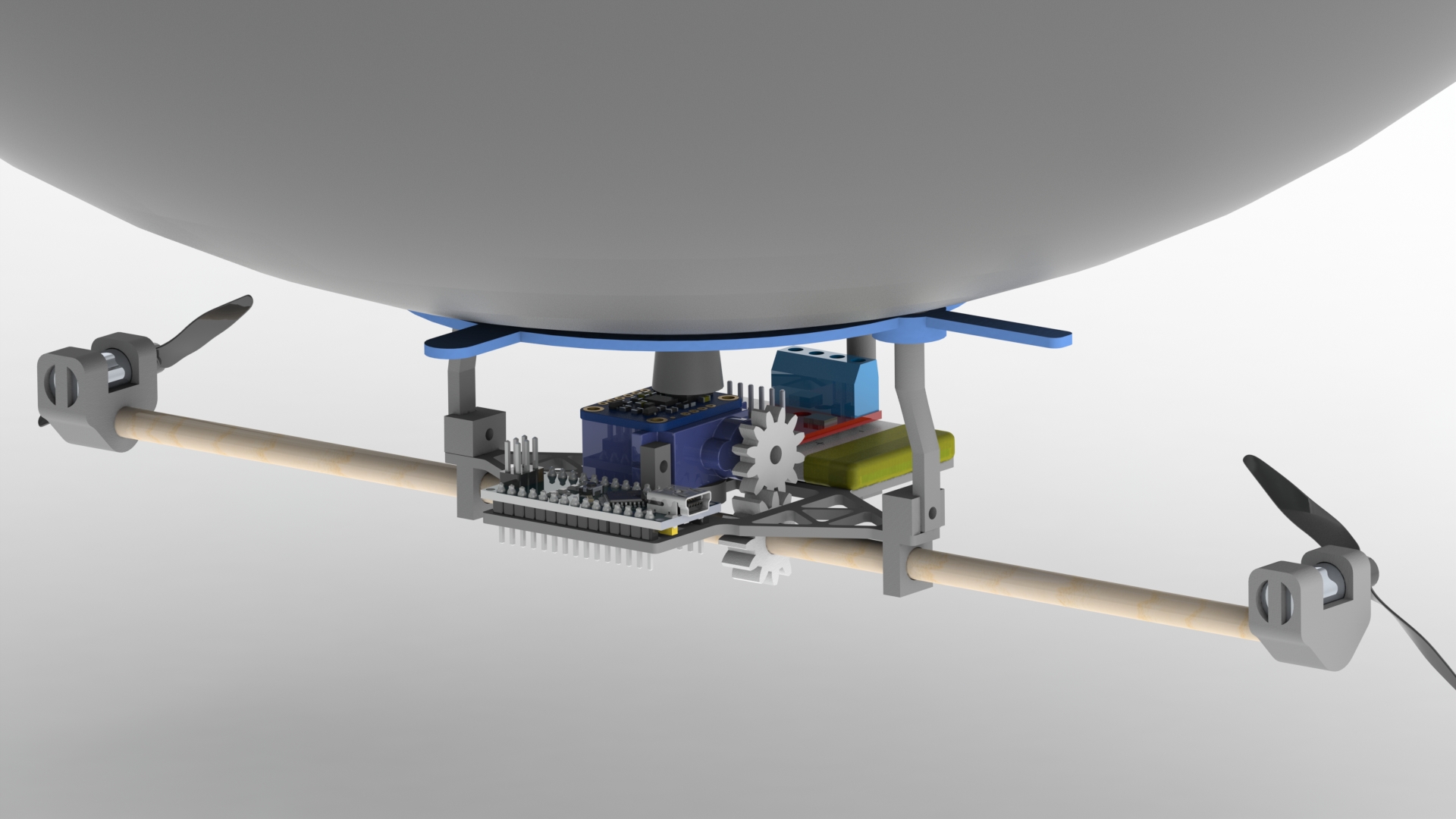 CAD rendering of the BLIMP platform.
CAD rendering of the BLIMP platform.
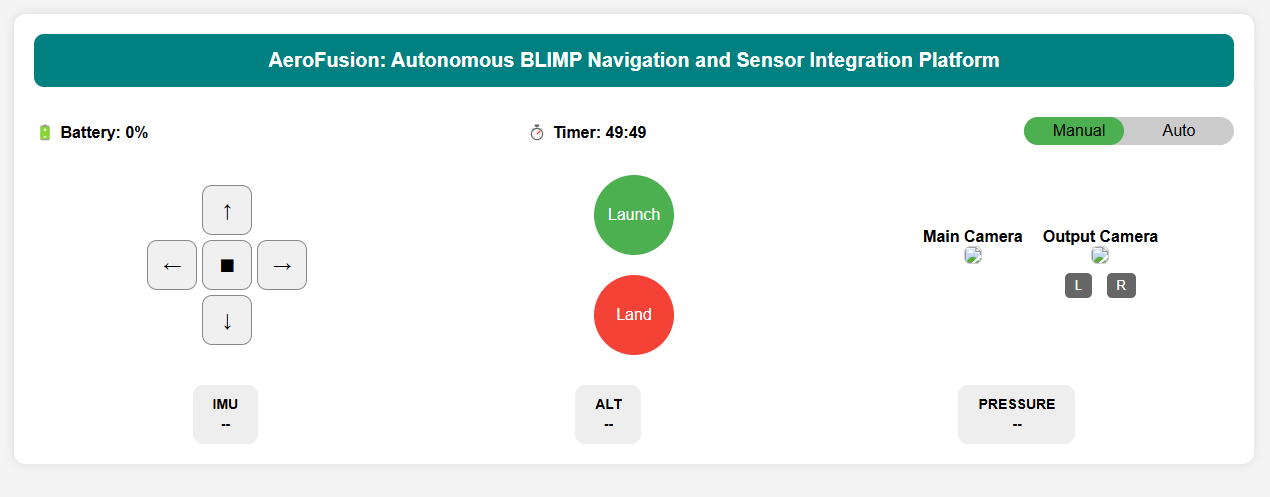 Browser-based ROS telemetry and controls.
Browser-based ROS telemetry and controls.
Architecture
/image_raw → YOLOv5_Detector → /blimp/detected_position
/imu_data + /barometer_data + /balloon_input → InvKine → /forces
/forces → F_to_ESC → /ESC_balloon_input
/ESC_Manual_input + /ESC_balloon_input → ModeSwitch → /ESC_input → ESC_Driver
Key nodes:
- detect_cpp (C++): camera detection and goal/balloon modes.
- inv_kine (C++): force estimation from IMU/barometer/vision.
- f_to_esc (C++/Eigen): body forces → ESC PWM via pseudo-inverse.
- esc_driver (Python/pigpio): PWM output and ESC arming.
- joy_to_esc (Python): manual teleop mapping.
- mode_switch (Python): manual vs autonomous arbitration.
- read_imu, read_altitude (Python): sensor interfaces.
Modeling and Identification
- 6-DOF dynamics: rigid + added mass, Coriolis/centripetal, linear damping, restoring forces.
- Allocation: non-square thruster map solved with Moore–Penrose pseudo-inverse.
- System ID: SolidWorks inertia, Lamb k-factors for added mass, thrust-stand linear PWM→thrust fits, and damping via flight tests with Vicon.
Representative figures:
- Thrust vs PWM: Figure 4/5
- Block diagram: System diagram
Implementation Details
Platform: Raspberry Pi, ROS 2 Humble, rclpy/rclcpp, Eigen, pigpio, OpenCV, roslibjs, rosbridge_server, web_video_server.
Selected topics:
- Perception:
/image_raw,/blimp/detected_position - Sensing:
/imu_data,/barometer_data - Control:
/forces,/ESC_balloon_input,/ESC_Manual_input,/ESC_input
How to Run (excerpt)
# Workspace
mkdir -p ~/blimp_ws/src
cd ~/blimp_ws/src && git clone https://github.com/RAS598-2025-S-Team03/BLIMP-Packages.git
# Build interfaces first, then all
cd ~/blimp_ws && colcon build --packages-select blimp_interfaces
source install/setup.bash
colcon build
# Optional: Oak-D Lite camera stack in separate workspace
# (see project docs for install script and rosdep)
# Verify joystick
ros2 run joy game_controller_node
# Arm ESCs
ros2 launch auto_control arming.py
# Launch full stack
ros2 launch auto_control updated_launch.py
# GUI bridge + camera stream
ros2 launch blimp_gui rosbridge_camera_launch.py